
5 基于 Keil MDK 移植RT-Thread Nano 上移植FinSH
5.1 FinSH简介
FinSH是RT-Thread的命令行外壳(shell),提供一套供用户在命令行的操作接口,主要用于调试、查看系统信息。在大部分嵌入式系统中,一般开发调试都使用硬件调试器和printf日志打印,在有些情况下,这两种方式并不是那么好用。比如对于RT-Thread这个多线程系统,我们想知道某个时刻系统中的线程运行状态、手动控制系统状态。如果有一个shell,就可以输入命令,直接相应的函数执行获得需要的信息,或者控制程序的行为。这无疑会十分方便。硬件拓扑结构如下图所示:
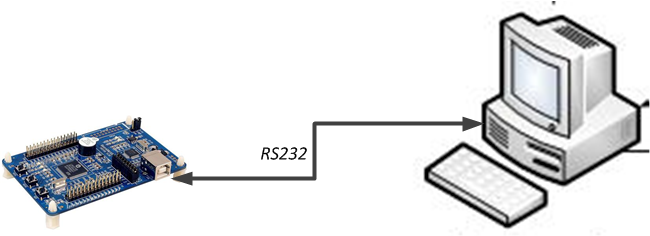
用户在控制终端输入命令,控制终端通过串口、USB、网络等方式将命令传给设备里的 FinSH,FinSH 会读取设备输入命令,解析并自动扫描内部函数表,寻找对应函数名,执行函数后输出回应,回应通过原路返回,将结果显示在控制终端上。
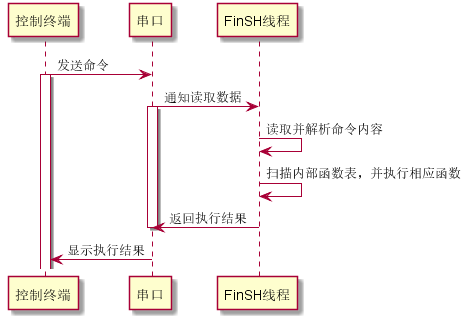
当使用串口连接设备与控制终端时,FinSH 命令的执行流程,如下图所示:
FinSH 支持权限验证功能,系统在启动后会进行权限验证,只有权限验证通过,才会开启 FinSH 功能,提升系统输入的安全性。
FinSH 支持自动补全、查看历史命令等功能,通过键盘上的按键可以很方便的使用这些功能。
FinSH支持两种模式,分别是传统命令行模式和 C 语言解释器模式:
1.C语言解释器模式, 为行文方便称之为c-style; C 语言解释器模式下,FinSH 能够解析执行大部分 C 语言的表达式,并使用类似 C 语言的函数调用方式访问系统中的函数及全局变量,此外它也能够通过命令行方式创建变量。在该模式下,输入的命令必须类似 C 语言中的函数调用方式,即必须携带 () 符号,例如,要输出系统当前所有线程及其状态,在 FinSH 中输入 list_thread() 即可打印出需要的信息。FinSH 命令的输出为此函数的返回值。对于一些不存在返回值的函数(void 返回值),这个打印输出没有意义。
2.传统命令行模式,此模式又称为msh(module shell)。C语言表达式解释模式下, finsh能够解析执行大部分C语言的表达式,并使用类似C语言的函数调用方式访问系统中的函数及全局变量,此外它也能够通过命令行方式创建变量。在msh模式下,finsh运行方式类似于dos/bash等传统shell。例如,可以通过 cd / 命令将目录切换至根目录。msh 通过解析,将输入字符分解成以空格区分开的命令和参数。其命令执行格式如下所示:
command [arg1] [arg2] […]
其中 command 既可以是 RT-Thread 内置的命令,也可以是可执行的文件。
最初 FinSH 仅支持 C-Style 模式,后来随着 RT-Thread 的不断发展,C-Style 模式在运行脚本或者程序时不太方便,而使用传统的 shell 方式则比较方便。另外,C-Style 模式下,FinSH 占用体积比较大。出于这些考虑,在 RT-Thread 中增加了 msh 模式,msh 模式体积小,使用方便,推荐大家使用 msh 模式。
如果在 RT-Thread 中同时使能了这两种模式,那它们可以动态切换,在 msh 模式下输入 exit 后回车,即可切换到 C-Style 模式。在 C-Style 模式输入 msh() 后回车,即可进入 msh 模式。两种模式的命令不通用,msh 命令无法在 C-Style 模式下使用,反之同理。
FinSH的移植分为两个部分:第一部分是实现 UART 控制台,该部分只需要实现两个函数即可完成 UART 控制台打印功能。第二部分是移植 FinSH 组件,实现在控制台输入命令调试系统,该部分实现基于第一部分,只需要添加 FinSH 组件源码并再对接一个系统函数即可实现。下面将对这两部分进行说明。
5.2在 Nano 上添加 UART 控制台
在 RT-Thread Nano 上添加 UART 控制台打印功能后,就可以在代码中使用 RT-Thread 提供的打印函数 rt_kprintf() 进行信息打印,从而获取自定义的打印信息,方便定位代码 bug 或者获取系统当前运行状态等。实现控制台打印,需要完成基本的硬件初始化,以及对接一个系统输出字符的函数。
5.2.1串口初始化
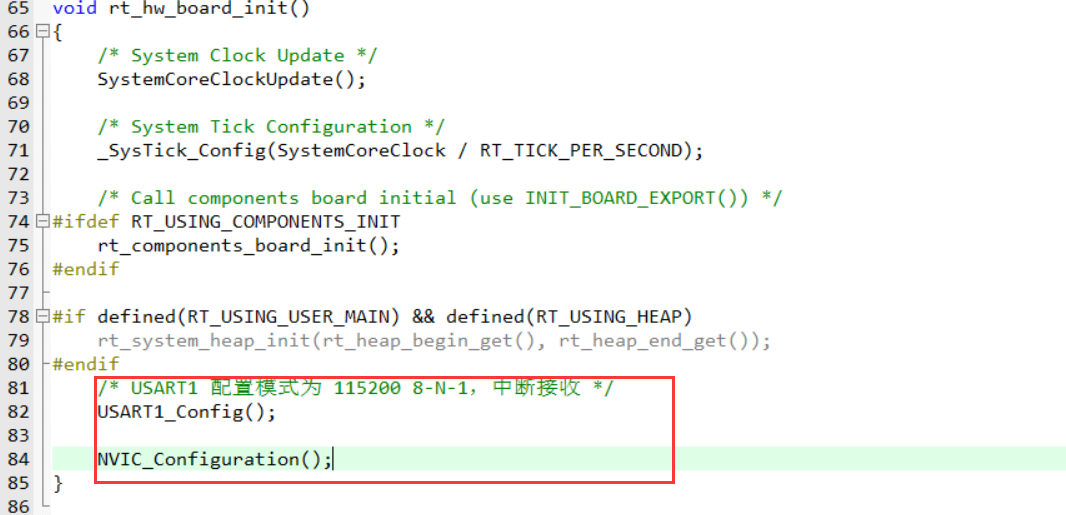
使用串口对接控制台的打印,首先需要初始化串口,如引脚、波特率等。需要在 board.c 中的 rt_hw_board_init() 函数中调用串口初始化,当然在main()函数也可以。
5.2.2实现 rt_hw_console_output
实现 finsh 组件输出一个字符,即在该函数中实现 uart 输出字符:
/*输出一个字符,系统函数,函数名不可更改 */
void rt_hw_console_output(const char *str);示例代码:如下是基于STM32F103 标准库3.5的串口驱动对接的 rt_hw_console_output() 函数,实现控制台字符输出,示例仅做参考。
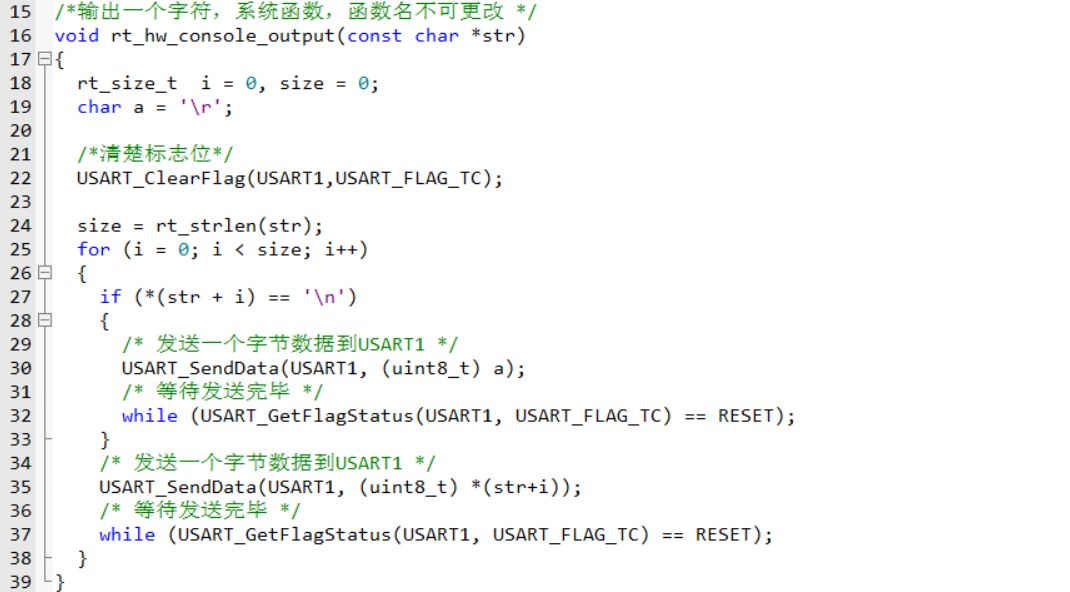
注意:RT-Thread 系统中已有的打印均以 \n 结尾,而并非 \r\n,所以在字符输出时,需要在输出 \n 之前输出 \r,完成回车与换行,否则系统打印出来的信息将只有换行。
5.2.3结果验证
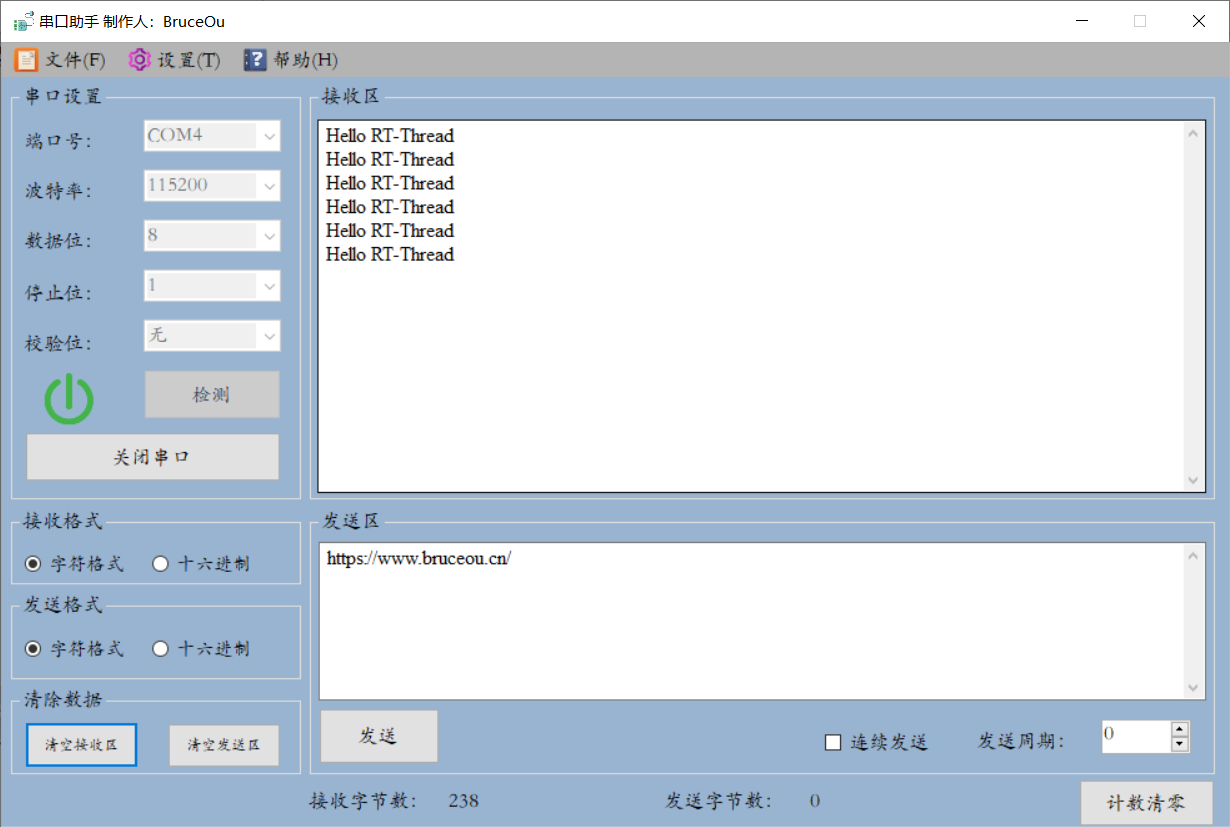
在应用代码中编写含有 rt_kprintf() 打印的代码,编译下载,打开串口助手进行验证。如下图是一个在 main() 函数中每隔 1 秒进行循环打印 Hello RT-Thread 的示例效果:
5.3在 Nano 上添加 FinSH 组件
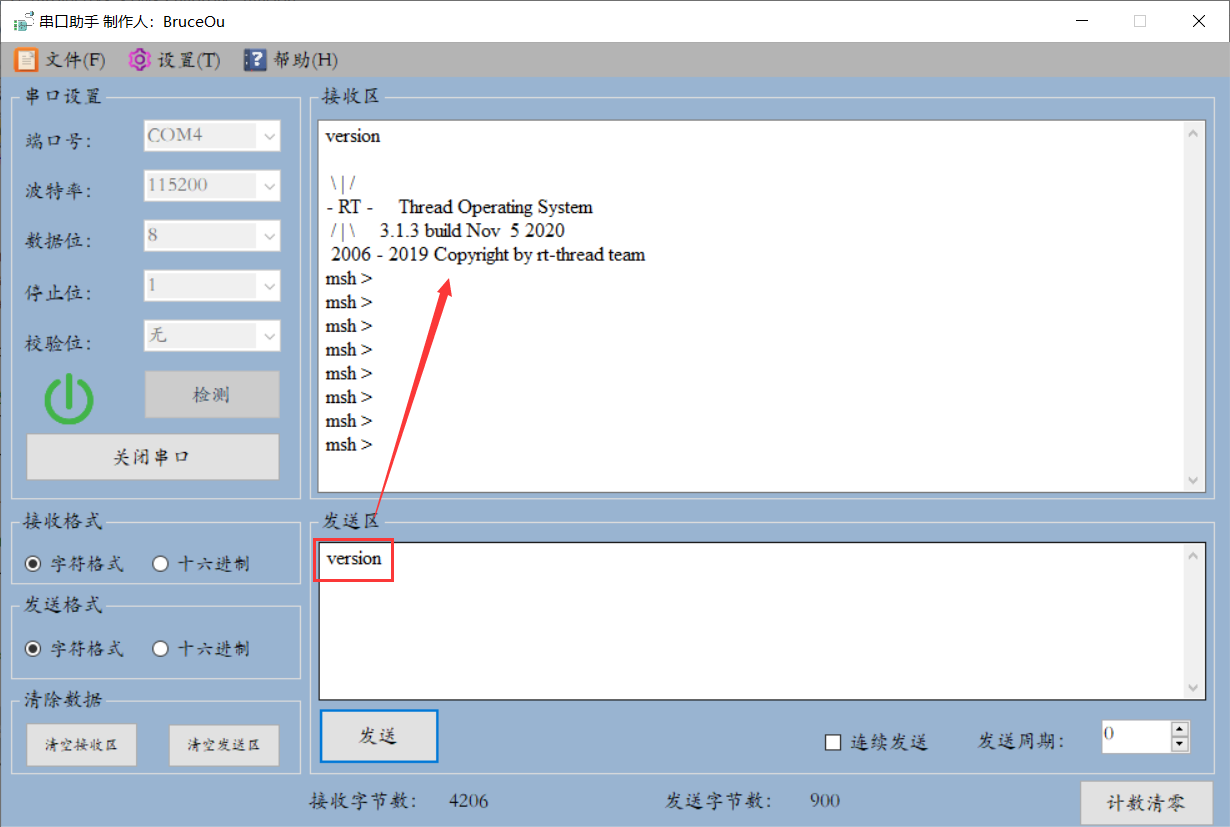
RT-Thread FinSH 是 RT-Thread 的命令行组件(shell),提供一套供用户在命令行调用的操作接口,主要用于调试或查看系统信息。它可以使用串口 / 以太网 / USB 等与 PC 机进行通信,使用 FinSH 组件基本命令的效果图如下所示:
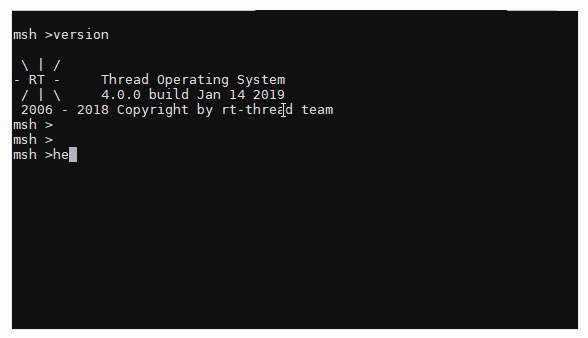
本文以串口 UART 作为 FinSH 的输入输出端口与 PC 进行通信,描述如何在 Nano 上实现 FinSH shell 功能。
在 RT-Thread Nano 上添加 FinSH 组件,实现 FinSH 功能的步骤主要如下:
1.添加 FinSH 源码到工程。
2.实现函数对接。
5.3.1 KEIL 添加 FinSH 源码工程
点击 Manage Run-Environment:
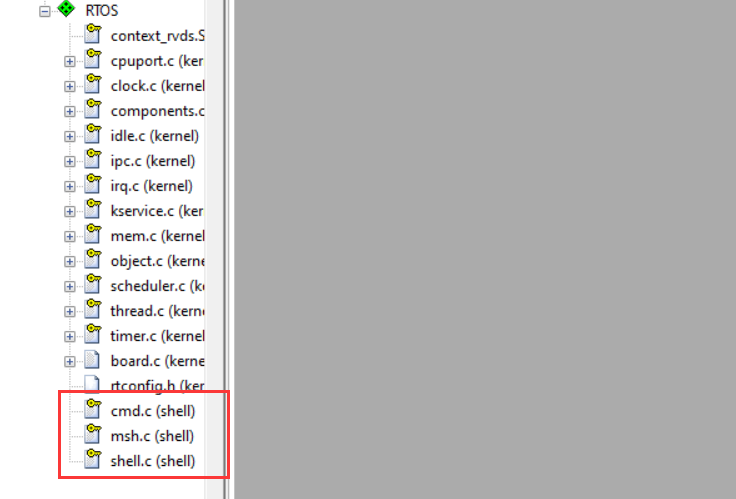
勾选 shell,这将自动把 FinSH 组件的源码到工程:
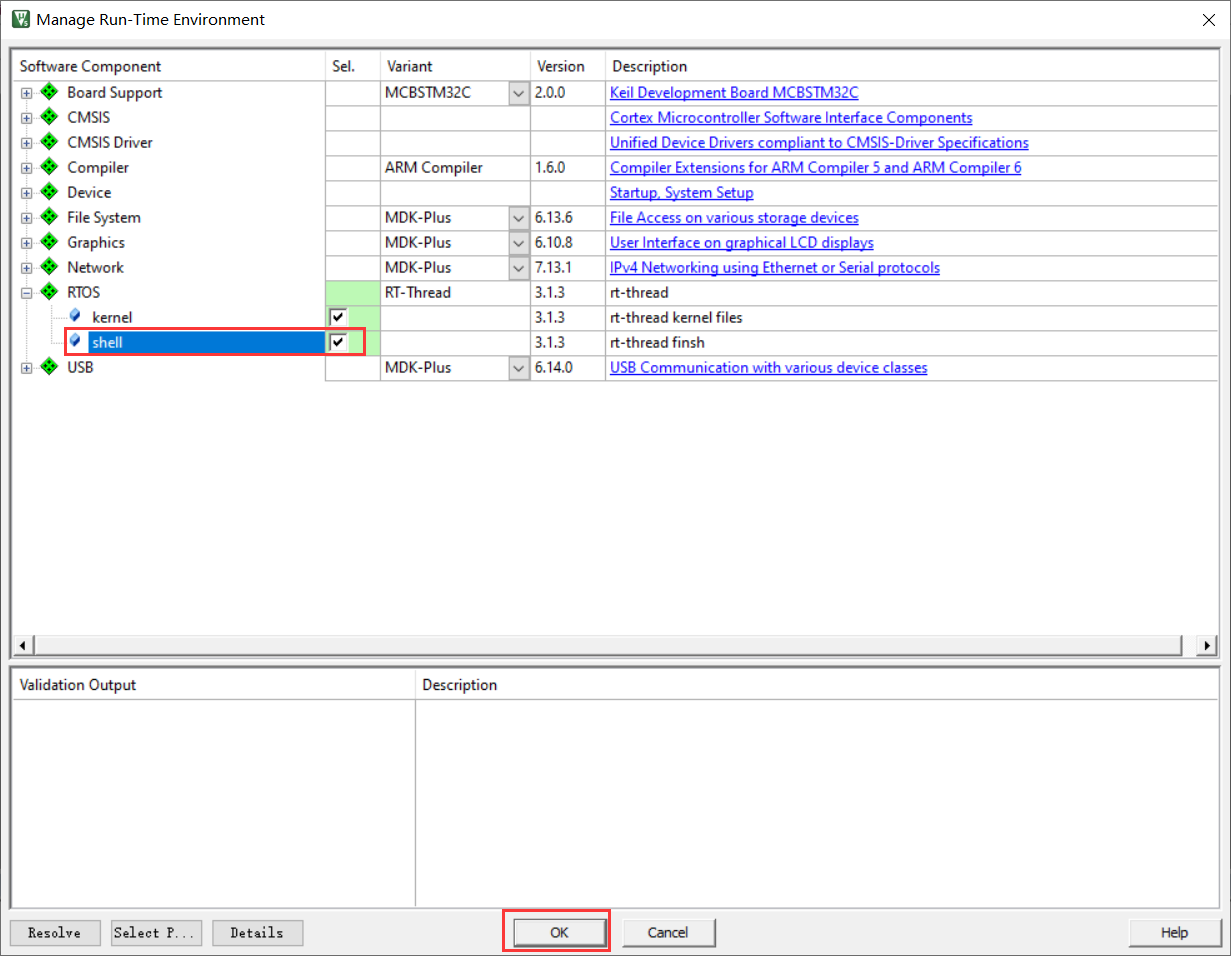
添加成功后会有三个文件:
5.3.2实现 rt_hw_console_getchar
要实现 FinSH 组件功能:既可以打印也能输入命令进行调试,控制台已经实现了打印功能,现在还需要在 board.c 中对接控制台输入函数,实现字符输入:
/* finsh 获取一个字符,系统函数,函数名不可更改 */
char rt_hw_console_getchar(void);rt_hw_console_getchar():控制台获取一个字符,即在该函数中实现 uart 获取字符,可以使用查询方式获取(注意不要死等,在未获取到字符时,需要让出 CPU),也可以使用中断方式获取。
5.3.2.1查询方式
如下是基于 STM32F103 标准库3.5的串口驱动对接的 rt_hw_console_getchar(),完成对接 FinSH 组件,其中获取字符采用查询方式,示例仅做参考。
/* 移植 FinSH,实现命令行交互, 需要添加 FinSH 源码,然后再对接 rt_hw_console_getchar */
char rt_hw_console_getchar(void)
{
int ch = -1;
if (USART_GetFlagStatus(USART1, USART_FLAG_RXNE) != RESET)
{
ch = (int)USART_ReceiveData(USART1);
}
else
{
if(USART_GetFlagStatus(USART1, USART_FLAG_ORE) != RESET)
{
USART_ClearFlag(USART1,USART_FLAG_TC);
}
rt_thread_mdelay(10);
}
return ch;
}5.3.2.2中断方式
如下是基于 STM32F103串口驱动,实现控制台输出与 FinSH Shell,其中获取字符采用中断方式。原理是,在 uart 接收到数据时产生中断,在中断中把数据存入 ringbuffer 缓冲区,然后释放信号量,tshell 线程接收信号量,然后读取存在 ringbuffer 中的数据。
/* 第一部分:ringbuffer 实现部分 */
#include <rtthread.h>
#include <string.h>
#define rt_ringbuffer_space_len(rb) ((rb)->buffer_size - rt_ringbuffer_data_len(rb))
struct rt_ringbuffer
{
rt_uint8_t *buffer_ptr;
rt_uint16_t read_mirror : 1;
rt_uint16_t read_index : 15;
rt_uint16_t write_mirror : 1;
rt_uint16_t write_index : 15;
rt_int16_t buffer_size;
};
enum rt_ringbuffer_state
{
RT_RINGBUFFER_EMPTY,
RT_RINGBUFFER_FULL,
/* half full is neither full nor empty */
RT_RINGBUFFER_HALFFULL,
};
rt_inline enum rt_ringbuffer_state rt_ringbuffer_status(struct rt_ringbuffer *rb)
{
if (rb->read_index == rb->write_index)
{
if (rb->read_mirror == rb->write_mirror)
return RT_RINGBUFFER_EMPTY;
else
return RT_RINGBUFFER_FULL;
}
return RT_RINGBUFFER_HALFFULL;
}
/**
* get the size of data in rb
*/
rt_size_t rt_ringbuffer_data_len(struct rt_ringbuffer *rb)
{
switch (rt_ringbuffer_status(rb))
{
case RT_RINGBUFFER_EMPTY:
return 0;
case RT_RINGBUFFER_FULL:
return rb->buffer_size;
case RT_RINGBUFFER_HALFFULL:
default:
if (rb->write_index > rb->read_index)
return rb->write_index - rb->read_index;
else
return rb->buffer_size - (rb->read_index - rb->write_index);
};
}
void rt_ringbuffer_init(struct rt_ringbuffer *rb,
rt_uint8_t *pool,
rt_int16_t size)
{
RT_ASSERT(rb != RT_NULL);
RT_ASSERT(size > 0);
/* initialize read and write index */
rb->read_mirror = rb->read_index = 0;
rb->write_mirror = rb->write_index = 0;
/* set buffer pool and size */
rb->buffer_ptr = pool;
rb->buffer_size = RT_ALIGN_DOWN(size, RT_ALIGN_SIZE);
}
/**
* put a character into ring buffer
*/
rt_size_t rt_ringbuffer_putchar(struct rt_ringbuffer *rb, const rt_uint8_t ch)
{
RT_ASSERT(rb != RT_NULL);
/* whether has enough space */
if (!rt_ringbuffer_space_len(rb))
return 0;
rb->buffer_ptr[rb->write_index] = ch;
/* flip mirror */
if (rb->write_index == rb->buffer_size-1)
{
rb->write_mirror = ~rb->write_mirror;
rb->write_index = 0;
}
else
{
rb->write_index++;
}
return 1;
}
/**
* get a character from a ringbuffer
*/
rt_size_t rt_ringbuffer_getchar(struct rt_ringbuffer *rb, rt_uint8_t *ch)
{
RT_ASSERT(rb != RT_NULL);
/* ringbuffer is empty */
if (!rt_ringbuffer_data_len(rb))
return 0;
/* put character */
*ch = rb->buffer_ptr[rb->read_index];
if (rb->read_index == rb->buffer_size-1)
{
rb->read_mirror = ~rb->read_mirror;
rb->read_index = 0;
}
else
{
rb->read_index++;
}
return 1;
}
/* 第二部分:finsh 移植对接部分 */
#define UART_RX_BUF_LEN 16
rt_uint8_t uart_rx_buf[UART_RX_BUF_LEN] = {0};
struct rt_ringbuffer uart_rxcb; /* 定义一个 ringbuffer cb */
static struct rt_semaphore shell_rx_sem; /* 定义一个静态信号量 */
/**
* @brief USART1 GPIO 配置,工作模式配置。115200 8-N-1
* @param None
* @retval None
*/
void USART1_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/* 初始化串口接收 ringbuffer */
rt_ringbuffer_init(&uart_rxcb, uart_rx_buf, UART_RX_BUF_LEN);
/* 初始化串口接收数据的信号量 */
rt_sem_init(&(shell_rx_sem), "shell_rx", 0, 0);
/* config USART1 clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
/* USART1 GPIO config */
/* Configure USART1 Tx (PA.09) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure USART1 Rx (PA.10) as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_DeInit(USART1);
/* USART1 mode config */
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No ;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
/* 使能串口1接收中断 */
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
USART_Cmd(USART1, ENABLE);
}
/**
* @brief 配置USART1接收中断
* @param None
* @retval None
*/
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* Configure the NVIC Preemption Priority Bits */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
/* Enable the USARTy Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
/*输出一个字符,系统函数,函数名不可更改 */
void rt_hw_console_output(const char *str)
{
rt_size_t i = 0, size = 0;
char a = '\r';
/*清楚标志位*/
USART_ClearFlag(USART1,USART_FLAG_TC);
size = rt_strlen(str);
for (i = 0; i < size; i++)
{
if (*(str + i) == '\n')
{
/* 发送一个字节数据到USART1 */
USART_SendData(USART1, (uint8_t) a);
/* 等待发送完毕 */
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
}
/* 发送一个字节数据到USART1 */
USART_SendData(USART1, (uint8_t) *(str+i));
/* 等待发送完毕 */
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
}
}
/* 移植 FinSH,实现命令行交互, 需要添加 FinSH 源码,然后再对接 rt_hw_console_getchar */
/* 中断方式 */
char rt_hw_console_getchar(void)
{
char ch = 0;
/* 从 ringbuffer 中拿出数据 */
while (rt_ringbuffer_getchar(&uart_rxcb, (rt_uint8_t *)&ch) != 1)
{
rt_sem_take(&shell_rx_sem, RT_WAITING_FOREVER);
}
return ch;
}
/* 第三部分:中断部分*/
void USART1_IRQHandler(void)
{
int ch = -1;
/* enter interrupt */
rt_interrupt_enter(); //在中断中一定要调用这对函数,进入中断
if( (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) && (USART_GetFlagStatus(USART1, USART_FLAG_RXNE) != RESET) )
{
while (1)
{
ch = -1;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
ch = USART_ReceiveData(USART1);
}
if(ch ==-1)
{
break;
}
/* 读取到数据,将数据存入 ringbuffer */
rt_ringbuffer_putchar(&uart_rxcb, ch);
}
rt_sem_release(&shell_rx_sem);
}
/* leave interrupt */
rt_interrupt_leave(); //在中断中一定要调用这对函数,离开中断
}【注】需要确认 rtconfig.h 中已使能 RT_USING_CONSOLE 宏定义
移植完成后,将程序下载到板子中,打开串口助手,在发送去输入字符,点击发送即可进行交互。注意一定要有换行符。
这里推荐使用xshell等工具,用起来就有种Linux终端的感觉。

5.4 FinSH流程分析
FinSH组件初始化函数finsh_system_init(),并且添加了INIT_COMPONENTEXPORT(finsh system_init),支持组件初始化;
/*
* @ingroup finsh
*
* This function will initialize finsh shell
*/
int finsh_system_init(void)
{
rt_err_t result = RT_EOK;
rt_thread_t tid;
#ifdef FINSH_USING_SYMTAB
#if defined(__CC_ARM) || defined(__CLANG_ARM) /* ARM C Compiler */
extern const int FSymTab$$Base;
extern const int FSymTab$$Limit;
extern const int VSymTab$$Base;
extern const int VSymTab$$Limit;
finsh_system_function_init(&FSymTab$$Base, &FSymTab$$Limit);
#ifndef FINSH_USING_MSH_ONLY
finsh_system_var_init(&VSymTab$$Base, &VSymTab$$Limit);
#endif
#elif defined (__ICCARM__) || defined(__ICCRX__) /* for IAR Compiler */
finsh_system_function_init(__section_begin("FSymTab"),
__section_end("FSymTab"));
finsh_system_var_init(__section_begin("VSymTab"),
__section_end("VSymTab"));
#elif defined (__GNUC__) || defined(__TI_COMPILER_VERSION__)
/* GNU GCC Compiler and TI CCS */
extern const int __fsymtab_start;
extern const int __fsymtab_end;
extern const int __vsymtab_start;
extern const int __vsymtab_end;
finsh_system_function_init(&__fsymtab_start, &__fsymtab_end);
finsh_system_var_init(&__vsymtab_start, &__vsymtab_end);
#elif defined(__ADSPBLACKFIN__) /* for VisualDSP++ Compiler */
finsh_system_function_init(&__fsymtab_start, &__fsymtab_end);
finsh_system_var_init(&__vsymtab_start, &__vsymtab_end);
#elif defined(_MSC_VER)
unsigned int *ptr_begin, *ptr_end;
if(shell)
{
rt_kprintf("finsh shell already init.\n");
return RT_EOK;
}
ptr_begin = (unsigned int *)&__fsym_begin;
ptr_begin += (sizeof(struct finsh_syscall) / sizeof(unsigned int));
while (*ptr_begin == 0) ptr_begin ++;
ptr_end = (unsigned int *) &__fsym_end;
ptr_end --;
while (*ptr_end == 0) ptr_end --;
finsh_system_function_init(ptr_begin, ptr_end);
#endif
#endif
#ifdef RT_USING_HEAP
/* create or set shell structure */
shell = (struct finsh_shell *)rt_calloc(1, sizeof(struct finsh_shell));
if (shell == RT_NULL)
{
rt_kprintf("no memory for shell\n");
return -1;
}
tid = rt_thread_create(FINSH_THREAD_NAME,
finsh_thread_entry, RT_NULL,
FINSH_THREAD_STACK_SIZE, FINSH_THREAD_PRIORITY, 10);
#else
shell = &_shell;
tid = &finsh_thread;
result = rt_thread_init(&finsh_thread,
FINSH_THREAD_NAME,
finsh_thread_entry, RT_NULL,
&finsh_thread_stack[0], sizeof(finsh_thread_stack),
FINSH_THREAD_PRIORITY, 10);
#endif /* RT_USING_HEAP */
rt_sem_init(&(shell->rx_sem), "shrx", 0, 0);
finsh_set_prompt_mode(1);
if (tid != NULL && result == RT_EOK)
rt_thread_startup(tid);
return 0;
}这个函数会初始化FinSH组件,包括一些FinSH变量以及相关数据结构,同时会创建一个线程,代码如下:

接下来就进入finsh线程函数中,函数原型如下所示:
void finsh_thread_entry(void *parameter)
{
int ch;
/* normal is echo mode */
#ifndef FINSH_ECHO_DISABLE_DEFAULT
shell->echo_mode = 1;
#else
shell->echo_mode = 0;
#endif
#ifndef FINSH_USING_MSH_ONLY
finsh_init(&shell->parser);
#endif
#if !defined(RT_USING_POSIX) && defined(RT_USING_DEVICE)
/* set console device as shell device */
if (shell->device == RT_NULL)
{
rt_device_t console = rt_console_get_device();
if (console)
{
finsh_set_device(console->parent.name);
}
}
#endif
#ifdef FINSH_USING_AUTH
/* set the default password when the password isn't setting */
if (rt_strlen(finsh_get_password()) == 0)
{
if (finsh_set_password(FINSH_DEFAULT_PASSWORD) != RT_EOK)
{
rt_kprintf("Finsh password set failed.\n");
}
}
/* waiting authenticate success */
finsh_wait_auth();
#endif
rt_kprintf(FINSH_PROMPT);
while (1)
{
ch = finsh_getchar();
if (ch < 0)
{
continue;
}
/*
* handle control key
* up key : 0x1b 0x5b 0x41
* down key: 0x1b 0x5b 0x42
* right key:0x1b 0x5b 0x43
* left key: 0x1b 0x5b 0x44
*/
if (ch == 0x1b)
{
shell->stat = WAIT_SPEC_KEY;
continue;
}
else if (shell->stat == WAIT_SPEC_KEY)
{
if (ch == 0x5b)
{
shell->stat = WAIT_FUNC_KEY;
continue;
}
shell->stat = WAIT_NORMAL;
}
else if (shell->stat == WAIT_FUNC_KEY)
{
shell->stat = WAIT_NORMAL;
if (ch == 0x41) /* up key */
{
#ifdef FINSH_USING_HISTORY
/* prev history */
if (shell->current_history > 0)
shell->current_history --;
else
{
shell->current_history = 0;
continue;
}
/* copy the history command */
memcpy(shell->line, &shell->cmd_history[shell->current_history][0],
FINSH_CMD_SIZE);
shell->line_curpos = shell->line_position = strlen(shell->line);
shell_handle_history(shell);
#endif
continue;
}
else if (ch == 0x42) /* down key */
{
#ifdef FINSH_USING_HISTORY
/* next history */
if (shell->current_history < shell->history_count - 1)
shell->current_history ++;
else
{
/* set to the end of history */
if (shell->history_count != 0)
shell->current_history = shell->history_count - 1;
else
continue;
}
memcpy(shell->line, &shell->cmd_history[shell->current_history][0],
FINSH_CMD_SIZE);
shell->line_curpos = shell->line_position = strlen(shell->line);
shell_handle_history(shell);
#endif
continue;
}
else if (ch == 0x44) /* left key */
{
if (shell->line_curpos)
{
rt_kprintf("\b");
shell->line_curpos --;
}
continue;
}
else if (ch == 0x43) /* right key */
{
if (shell->line_curpos < shell->line_position)
{
rt_kprintf("%c", shell->line[shell->line_curpos]);
shell->line_curpos ++;
}
continue;
}
}
/* received null or error */
if (ch == '\0' || ch == 0xFF) continue;
/* handle tab key */
else if (ch == '\t')
{
int i;
/* move the cursor to the beginning of line */
for (i = 0; i < shell->line_curpos; i++)
rt_kprintf("\b");
/* auto complete */
shell_auto_complete(&shell->line[0]);
/* re-calculate position */
shell->line_curpos = shell->line_position = strlen(shell->line);
continue;
}
/* handle backspace key */
else if (ch == 0x7f || ch == 0x08)
{
/* note that shell->line_curpos >= 0 */
if (shell->line_curpos == 0)
continue;
shell->line_position--;
shell->line_curpos--;
if (shell->line_position > shell->line_curpos)
{
int i;
rt_memmove(&shell->line[shell->line_curpos],
&shell->line[shell->line_curpos + 1],
shell->line_position - shell->line_curpos);
shell->line[shell->line_position] = 0;
rt_kprintf("\b%s \b", &shell->line[shell->line_curpos]);
/* move the cursor to the origin position */
for (i = shell->line_curpos; i <= shell->line_position; i++)
rt_kprintf("\b");
}
else
{
rt_kprintf("\b \b");
shell->line[shell->line_position] = 0;
}
continue;
}
/* handle end of line, break */
if (ch == '\r' || ch == '\n')
{
#ifdef FINSH_USING_HISTORY
shell_push_history(shell);
#endif
#ifdef FINSH_USING_MSH
if (msh_is_used() == RT_TRUE)
{
if (shell->echo_mode)
rt_kprintf("\n");
msh_exec(shell->line, shell->line_position);
}
else
#endif
{
#ifndef FINSH_USING_MSH_ONLY
/* add ';' and run the command line */
shell->line[shell->line_position] = ';';
if (shell->line_position != 0) finsh_run_line(&shell->parser, shell->line);
else
if (shell->echo_mode) rt_kprintf("\n");
#endif
}
rt_kprintf(FINSH_PROMPT);
memset(shell->line, 0, sizeof(shell->line));
shell->line_curpos = shell->line_position = 0;
continue;
}
/* it's a large line, discard it */
if (shell->line_position >= FINSH_CMD_SIZE)
shell->line_position = 0;
/* normal character */
if (shell->line_curpos < shell->line_position)
{
int i;
rt_memmove(&shell->line[shell->line_curpos + 1],
&shell->line[shell->line_curpos],
shell->line_position - shell->line_curpos);
shell->line[shell->line_curpos] = ch;
if (shell->echo_mode)
rt_kprintf("%s", &shell->line[shell->line_curpos]);
/* move the cursor to new position */
for (i = shell->line_curpos; i < shell->line_position; i++)
rt_kprintf("\b");
}
else
{
shell->line[shell->line_position] = ch;
if (shell->echo_mode)
rt_kprintf("%c", ch);
}
ch = 0;
shell->line_position ++;
shell->line_curpos++;
if (shell->line_position >= FINSH_CMD_SIZE)
{
/* clear command line */
shell->line_position = 0;
shell->line_curpos = 0;
}
} /* end of device read */
}函数主体依然是一个while(1)循环,这是显然的,因为finsh要不停的监听终端上输入。
if (rt_sem_take(&shell->rx_sem, RT_WAITING_FOREVER) != RT_EOK) continue;如果串口上没有收到任何数据,并且串口缓冲区中也无数据,即shell→rx_sem信号量的值为0,那么这个函数会使finsh线程休眠,RTT内核会执行其他线程。
当串口收到数据,串口终端调用回调函数finsh_rx_ind函数来释放信号量,这会唤醒finsh线程,rt_sem_take函数会执行完毕,继续执行接下来的代码。
接下来的代码调用rt_device_read函数从串口数据缓冲池中读取一个字节。
然后判断所读取的到这个字节(判断上下左右四个按键所代表的字节)。
(1) 如果是'\r',即表示用户按下了回车键,再调用rt_device_read函数来读取一个字节,如果读到,则这将更新读到的字节,一般情况下,这个函数会返回0,即没有读到新的字节。
(2) 如果是'\t',即表示用户按下了TAB键,则调用finsh_auto_complete函数,这个函数做自动补全操作,也就是根据当前已输入的字符串,从finsh内部已注册的函数/变量中查找匹配字符串,如果找到则会在终端上自动补全。
(3) 如果是0x7f或者0x08 说明:查ascii码表可知,0x08 表示按下了backspace键,【0x7f表示按下了DEL键,这个不对劲,如何知道当我们按下了键盘按键时,串口都收到了什么数据呢?】 这表示用户期望删除已经输入的字符串,根据测试结果,发送”\0x08 \0x08”,可以实现退格。
(4) 如果收到了'\r'或者'\n',则表示用户按下了回车,希望处理这个命令,那么finsh_run_line函数被执行,这个函数会从从finsh已注册的函数/变量中匹配当前从终端里获取的字符串,如果匹配到,则执行对应的函数(若字符串为函数名)或者打印变量的值(若字符串为已变量)。
(5) 回显字符,也就是将刚才从串口接收到终端发送的字符发送到终端软件上显示出来。这就是说,我们在终端软件上输入字符,并且可以看到我们输入的字符,实际上是板子上的串口重新发回来显示的。在上面finsh的线程代码中,rt_device_write函数是在rt_kprintf中调用的。
然后回到(1),重复这个过程。
5.5 FinSH 内置命令
在 RT-Thread 中默认内置了一些 FinSH 命令,在 FinSH 中输入 help 后回车或者直接按下 Tab 键,就可以打印当前系统支持的所有命令。C-Style 和 msh 模式下的内置命令基本一致,这里就以 msh 为例。
msh 模式下,按下 Tab 键后可以列出当前支持的所有命令。默认命令的数量不是固定的,RT-Thread 的各个组件会向 FinSH 输出一些命令。例如,当打开 DFS 组件时,就会把 ls,cp,cd 等命令加到 FinSH 中,方便开发者调试。
以下为按下 Tab 键后打印出来的当前支持的所有显示 RT-Thread 内核状态信息的命令,左边是命令名称,右边是关于命令的描述:

值得注意的是,RT-Thread Nano支持的命令较少,和RT-Thread完整版比是有些不同的。
自定义 msh 命令
自定义的 msh 命令,可以在 msh 模式下被运行,将一个命令导出到 msh 模式可以使用如下宏接口:
MSH_CMD_EXPORT(name, desc);| 参数 | 描述 |
|---|---|
| name | 要导出的命令 |
| desc | 导出命令的描述 |
导出无参数命令时,函数的入参为 void,示例如下:
void hello(void)
{
rt_kprintf("hello RT-Thread!\n");
}
MSH_CMD_EXPORT(hello , say hello to RT-Thread);系统运行起来后,在 FinSH 控制台按 tab 键可以看到导出的命令:
msh />
RT-Thread shell commands:
hello - say hello to RT-Thread
version - show RT-Thread version information
list_thread - list thread
……运行 hello 命令,运行结果如下所示:
msh />hello
hello RT_Thread!
msh />导出有参数的命令时,函数的入参为 int argc 和 char**argv。argc 表示参数的个数,argv 表示命令行参数字符串指针数组指针。导出有参数命令示例如下:
#include <rtthread.h>
static void atcmd(int argc, char**argv)
{
if (argc < 2)
{
rt_kprintf("Please input'atcmd <server|client>'\n");
return;
}
if (!rt_strcmp(argv[1], "server"))
{
rt_kprintf("AT server!\n");
}
else if (!rt_strcmp(argv[1], "client"))
{
rt_kprintf("AT client!\n");
}
else
{
rt_kprintf("Please input'atcmd <server|client>'\n");
}
}
MSH_CMD_EXPORT(atcmd, atcmd sample: atcmd <server|client>);系统运行起来后,在 FinSH 控制台按 tab 键可以看到导出的命令:
msh />
RT-Thread shell commands:
hello - say hello to RT-Thread
atcmd - atcmd sample: atcmd <server|client>
version - show RT-Thread version information
list_thread - list thread
……运行 atcmd 命令,运行结果如下所示:
msh />atcmd
Please input 'atcmd <server|client>'
msh />atcmd server
AT server!
msh />代码获取方法
1.长按下面二维码,关注公众号[嵌入式实验楼]
2.在公众号回复关键词[RT-Thread]获取资料
